Change of Basis
In this page you will learn how you can transform a point from one coordinate system into another coordinate system.
In the previous topic of
Basis Vector
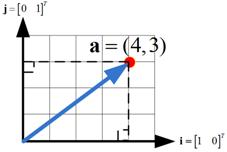
, you have learned that we can change the coordinate system. Suppose you have a point with coordinate of
![]() in Euclidean space (with standard basis coordinate
in Euclidean space (with standard basis coordinate
![]() and
and
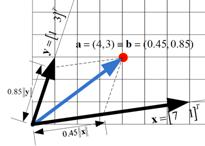
![]() ). We want to find the coordinate of the same point in a new coordinate system form by basis vector
). We want to find the coordinate of the same point in a new coordinate system form by basis vector
![]() and
and
![]() . The figure below shows that the new coordinate of the same point is
. The figure below shows that the new coordinate of the same point is
![]() . In this page, I will show you how you will obtain the coordinate in the new coordinate system.
. In this page, I will show you how you will obtain the coordinate in the new coordinate system.
Suppose we start with a point
![]() in the standard Euclidean basis
in the standard Euclidean basis
![]() and
and
![]() . We want to transform it into a new space
span
by basis vectors
. We want to transform it into a new space
span
by basis vectors
![]() and
and
![]() . First, we can do
horizontal concatenation
of the new basis vectors into a matrix
. First, we can do
horizontal concatenation
of the new basis vectors into a matrix
![]() . Then, the coordinate of a point in the old basis
. Then, the coordinate of a point in the old basis
![]() is equal to the
matrix multiplication
of the augmented matrix of the new basis
is equal to the
matrix multiplication
of the augmented matrix of the new basis
![]() with coordinate of the point in the new basis
with coordinate of the point in the new basis
![]() . That is
. That is
![]() . Thus to get the coordinate of a point in the new basis is the reverse, that is
. Thus to get the coordinate of a point in the new basis is the reverse, that is
![]() .
.
Example:
Our point in the Euclidean basis is
![]() . Our new basis is vector
. Our new basis is vector
![]() and
and
![]() . Augmenting the basis vectors form a matrix
. Augmenting the basis vectors form a matrix
![]() . The
inverse
of the matrix is
. The
inverse
of the matrix is
![]() . The coordinate of the point in the new coordinate is
. The coordinate of the point in the new coordinate is
 .
.
Example:
Now suppose we want to find back the coordinate of point
![]() from the coordinate system of basis vectors
from the coordinate system of basis vectors
![]() and
and
![]() into Euclidean system.
Augmenting
the basis vectors form a matrix
into Euclidean system.
Augmenting
the basis vectors form a matrix
![]() . We have our coordinate point
. We have our coordinate point
 back.
back.
Note:
Transformation of coordinate systems follows equality of matrix-vector multiplication
![]() , where
, where
![]() and
and
![]() are the matrix of the respective basis vectors. In Euclidean coordinate system, the basis vectors form identity matrix
are the matrix of the respective basis vectors. In Euclidean coordinate system, the basis vectors form identity matrix
![]() . Thus, the formula
. Thus, the formula
![]() can be simplified into
can be simplified into
![]() or
or
![]() .
.
See Also
:
Basis Vector
,
Orthogonal Vector
,
Orthogonal Matrix
Rate this tutorial or give your comments about this tutorial