Solving System Linear Equation
Linear equation is an equation in the form of ![]()
The ![]() are the known constant.
are the known constant.
The ![]() are the
are the ![]() unknown variables. The problem in linear equation is to find the values of the unknown variables that satisfy the equation.
unknown variables. The problem in linear equation is to find the values of the unknown variables that satisfy the equation.
For example, when![]() ,
, ![]() and
and ![]() we have linear equation
we have linear equation ![]() and the solution is
and the solution is![]() .
.
We may also have several equations and several unknowns that we would like to find out. A linear system is a set of ![]() linear equations each in
linear equations each in ![]() unknown. We can write a linear system as
unknown. We can write a linear system as
When we have many equations and many unknowns, it is easier to represent the linear system into matrix. We put the constant coefficients of the equations into a matrix, and then we can multiply with the unknown to obtain the constants. To transform the system of linear equations into matrix format, you need to reorder the equations according to the order of the unknowns ![]() and put the coefficients of the unknowns into matrix coefficients
and put the coefficients of the unknowns into matrix coefficients![]() . The constants on the right hand side of the equation are written into vector constants
. The constants on the right hand side of the equation are written into vector constants![]() . The linear system above can be written as
. The linear system above can be written as
Thus, a linear system can be simplified into a matrix product
![]()
A solution of the linear system is an ordered collection of ![]() numbers that satisfies the
numbers that satisfies the ![]() linear equations, which can be written in short as a vector solution
linear equations, which can be written in short as a vector solution![]() .
.
Example:
Solve a linear system with three equations and three unknowns
The linear system can be written as ![]() where matrix
where matrix
 and
and 
The solution of the linear system is
The interactive program below will help you to solve a system of linear equations![]() . To use the program, first you need to transform your system of linear equations into matrix format as explained in the example above. Your input is matrix coefficients
. To use the program, first you need to transform your system of linear equations into matrix format as explained in the example above. Your input is matrix coefficients ![]() and vector constants
and vector constants![]() . Then you click “Solve Linear System Ax=b” button and the program will produce the vector solution
. Then you click “Solve Linear System Ax=b” button and the program will produce the vector solution![]() . Optionally, you can select your output is either in decimal or in rational format. The rational output is an approximation of the decimal format. When you click “Random Example” button, it will create random input matrix to provide you with more examples of linear system. Note that if the coefficient matrix is singular or nearly singular, you will get only the approximate solution in least square sense using generalized inverse such that the error is minimized
. Optionally, you can select your output is either in decimal or in rational format. The rational output is an approximation of the decimal format. When you click “Random Example” button, it will create random input matrix to provide you with more examples of linear system. Note that if the coefficient matrix is singular or nearly singular, you will get only the approximate solution in least square sense using generalized inverse such that the error is minimized ![]() .
.
Notes
Some important notes on linear systems are:
- A linear system
 is called non-homogeneous system when vector
is called non-homogeneous system when vector  is not a zero vector. A linear system
is not a zero vector. A linear system  is called homogeneous system because vector
is called homogeneous system because vector  is a zero vector.
is a zero vector. - Rank of matrix
 denoted by
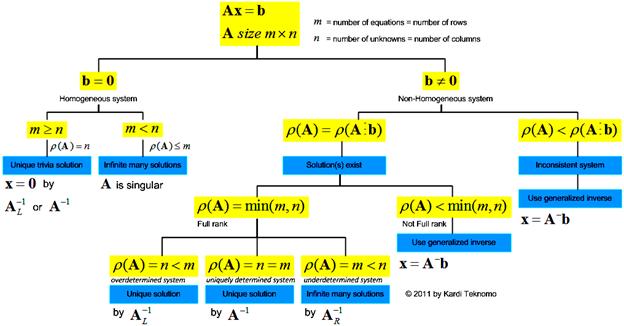
denoted by is a scalar number to determine whether the linear system is consistent (has a solution), has many solutions or has a unique set of solutions, or inconsistent (has no solution using matrix inverse). Diagram below shows the solution of the system of linear equations based on rank of the coefficient matrix
is a scalar number to determine whether the linear system is consistent (has a solution), has many solutions or has a unique set of solutions, or inconsistent (has no solution using matrix inverse). Diagram below shows the solution of the system of linear equations based on rank of the coefficient matrix  in comparison with the matrix size and rank of the augmented matrix coefficients
in comparison with the matrix size and rank of the augmented matrix coefficients  and the vector constants
and the vector constants  ,
, .
.  has infinitely many non-trivia solutions if and only if the matrix coefficient
has infinitely many non-trivia solutions if and only if the matrix coefficient  is singular (i.e. It has no inverse, or
is singular (i.e. It has no inverse, or  ), which happens when the number of equations is less than the unknowns (
), which happens when the number of equations is less than the unknowns ( ). Otherwise, homogeneous system only has unique trivia solution of
). Otherwise, homogeneous system only has unique trivia solution of . General solution for homogeneous system is
. General solution for homogeneous system is where
where  is an arbitrary non-zero vector.
is an arbitrary non-zero vector.- The linear system
 is called consistent if
is called consistent if . Consistent system can be solved either using matrix inverse
. Consistent system can be solved either using matrix inverse , left inverse
, left inverse or right inverse
or right inverse . Full rank non-homogeneous system (happen when
. Full rank non-homogeneous system (happen when  ) has three possible options:
) has three possible options:
- When the number of the unknowns in a linear system is the same as the number of equations (
 ), the system is called uniquely determined system. There is only one possible solution to the system computed using matrix inverse
), the system is called uniquely determined system. There is only one possible solution to the system computed using matrix inverse .
. - When we have more equations than the unknown (
 ), the system is called overdetermined system. The system is usually inconsistent with no possible solution. It is still possible to find unique solution using left inverse
), the system is called overdetermined system. The system is usually inconsistent with no possible solution. It is still possible to find unique solution using left inverse .
. - When you have more unknowns than the equations (
 ), your system is called underdetermined system. The system usually has infinitely many possible solutions. The standard solution can be computed using right inverse
), your system is called underdetermined system. The system usually has infinitely many possible solutions. The standard solution can be computed using right inverse .
.
- When the number of the unknowns in a linear system is the same as the number of equations (
- When non-homogeneous system
 is not full rank or when the rank of the matrix coefficients is less than the rank of the augmented matrix coefficients and the vector constants
is not full rank or when the rank of the matrix coefficients is less than the rank of the augmented matrix coefficients and the vector constants  then the system is usually inconsistent with no possible solution using matrix inverse. It is still possible to find the approximate least square solution that minimizes the norm of error
then the system is usually inconsistent with no possible solution using matrix inverse. It is still possible to find the approximate least square solution that minimizes the norm of error using generalized inverse
using generalized inverse where
where  is an arbitrary non-zero vector.
is an arbitrary non-zero vector.
See also: Generalized Inverse, matrix rank, determinant, Solving Linear equations using MS Excel
Rate this tutorial or give your comments about this tutorial
Preferable reference for this tutorial is
Teknomo, Kardi (2011) Linear Algebra tutorial. https:\\people.revoledu.com\kardi\tutorial\LinearAlgebra\